
产品介绍
空地协同异构共融机器人研究实验室
空地机器人协同作业是近年来机器人领域的重点研究方向,其内容涉及环境感知、地图构建、任务规划、多机控制与智能调度等领域的知识。
目前无人机系统的智能化水平有限,单一的无人系统难以适应复杂多变的环境,无法及时有效地完成指定任务。一方面,作业任务通常具有高度多样性和复杂性,多种要素相互交织,无人机载传感器受到飞行速度和高度的限制以及飞行环境中的不确定性,为识别和定位地面目标的能力设置了障碍,单个空中机器人(UAV)难以完成任务,因此多个无人机协作已成为必然选择。另一方面,地面环境要素复杂,地面移动机器人(UGV)虽然可以精确地定位地面目标,但无法快速移动或穿越建筑物和栅栏等障碍物,且通信链路面临较多阻碍;空中机器人和地面机器人都有其自身的局限性,这在一定程度上降低了其执行任务的效率;另一方面,UAV和UGV在速度、传感、通信以及有效负载能力等方面具有显著的互补性。因此,开展多个地面机器人和多个空中机器人协同作战系统中自主导航、复杂物体自主抓取、协同组队、多机器人控制等关键技术研究具有非常广阔的应用前景。
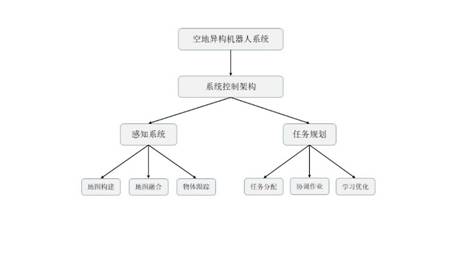
空地异构机器人实验室建设方案体系结构如下图:
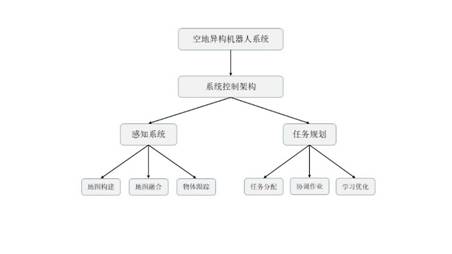
空地异构机器人系统由硬件系统与软件系统组成,硬件系统包括无人机、移动平台以及用于感知环境信息的多种传感器。异构机器人通过传感器感知任务场景信息用于地图构建、地图融合以及物体跟踪等任务,不同类型的传感器之间进行信息融合可以对任务场景进行立体感知,从而提高异构机器人系统的鲁棒性。软件系统主要指异构机器人的控制架构,包括多机器人间的任务分配、协调作业以及学习优化等内容。异构机器人系统在处理动态场景下的复杂任务的过程中,首先通过传感器获取足够的环境信息用于机器人任务的推理与决策,多机器人通过协调作业完成具体任务目标,任务过程中通过学习获取经验知识用于系统的优化。
空地异构机器人系统的主要由地面UGV平台和无人机以及各种传感器组成,无人机以及UGV平台上搭载不同类型的传感器,该系统主要组成部分如下:
husky全地形移动平台:
该平台采用四轮差速驱动系统,适合全地形的轮胎以及较高的底盘高度能够适应各种路面,能够适应户外的工作环境,车体内置高速处理器、编码器、IMU能够实现车体的底层控制,并附带有遥控装置,平台安装UST-10LX 2D激光传感器,扫描测距范围10m,可用于高速运动机器人避障和位置识别;高精度、高分辨率、宽视场设计给自主导航机器人提供了良好的环境识别能力;紧凑型设计节约了安装空间,低重量、低功耗。

UR5六自由度轻量型机械臂:
UR5工业机械手臂具有轻巧、高度灵活等优点,有效载荷达5千克,工作半径达 33.5英寸(850 毫米),可完美地优化轻量级协作流程(如抓取、放置和测试)。易于编程,设置快捷,具备协作性与安全性,可用于替代人工从事的重复性、危险性作业场景。

KINECT深度传感器:
Kinect是微软公司开发的一种用于人机交互的体感周边外设,具有即时动态捕捉、影像辨识、麦克风输入、语音辨识、社群互动等功能。主要特色包括:
原始感测数据流:开发人员能够直接取得距离传感器、彩色摄影机以及四单元麦克风数组的原始数据流,可以利用Kinect传感器的低阶数据流为基础进行应用程序开发。
骨架追踪:Kinect能够实现视野内一位或二位用户的骨架影像,便于建立以体感操作的应用程序。
音效功能:包括抑制噪音与回音消除功能、可透过音波形式辨识声音来源,并且能与Windows语音识别API整合。
简易的安装:Kinect提供了在Windows系统上的标准化安装方式,无需复杂的组态设定。
完整的说明文件:SDK也随附详细的高质量技术文件。除了内建的说明档案之外,还包括了多个范例详细的逐步分解说明。

大疆M系列无人机:
该系列无人机具有高负载和优秀的飞行性能,搭载了专业级的飞行控制系统,配备了IMU和GNSS模块,配合软件解析余度实现6路冗余导航系统,模块安装进行避震设计,数据更准确,能够实现精准的操控和稳定的飞行表现。并支持搭载云台和进行硬件的扩展,为后期开发提供了较大的空间。

Guidance立体视觉系统:
Guidance是一款全新的视觉传感导航系统,内置功能强大的处理核心,配备五组视觉超声波组合传感器,采用高精度立体视觉算法,近地面定位精度可达厘米级,在复杂地形和高速飞行条件下均可提供定位信息,有效高度高达20米,可实时监测多个方向的环境信息并感知障碍物,与适当的飞行控制器配合,可使得飞行器在高速飞行中对可能发生的碰撞及时避让。

该套实验设备可开展以下科学研究:
空地异构机器人控制架构
空地异构机器人分布式感知与地图构建
空地异构机器人任务规划与协同作业
咨询该商品价格
品名:空地协同异构共融机器人研究实验室
其他商品
-
Xsens MVN Analyze惯性运动捕捉分
¥运动捕捉分析软件 -
ViveLab Ergo3D虚拟空间中的人体
¥运动捕捉,人机工程学 -
I-Scan接触压力分布测量系统
¥接触力压力分布测量