

产品介绍
数字工厂,机器人技术应用的动作捕捉手套cobra-gloves
关键词:运动捕捉手套、运动数据采集、手指动作捕捉
COBRA手套兼容与Vicon,Optitrack和Vive。
-COBRA手套是人体手部运动数据采集,数字工厂模拟人机工程学评估,机器人远程遥操作与AI抓取训练技术和高端动画制作中精确,快速安装的技术解决方案。

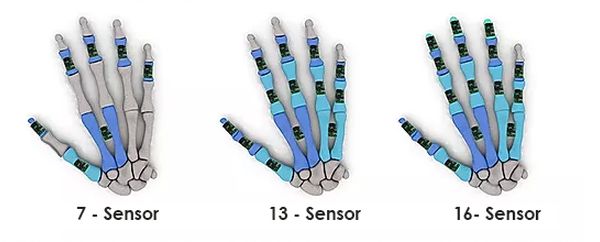
7、13或16个传感器运动捕捉手套
更多全身运动捕捉技术与生物、运动、机器人、人机工程、数字娱乐解决方案@南京合越智能,www.3xmaker.com
独立安装,与套装销售,或与光学装备一起使用的多对装;
自校准传感器适应磁性环境;
用户配置的运动学结构;
即时校准(可配置校准姿势);
更换电池并继续捕获您停下的位置,而无需在MoBu,Unity等中重新启动软件或重新校准软件。
同步系统中极其精确的时钟,用于光学设备集成(Vicon,Motion Analysis,Optitrack)
Motionbuilder,Unity,Unreal和Siemens Jack中的RealTime;
MoCap SW随附的免费用户友好型SDK和示例;
可拆卸电子产品;在几分钟内更改大小;
提供短指和长指手套类型。
7传感器手套:
我们的7传感器手套使用插值法来近似除7个指骨(使用IMU(惯性测量单元)传感器)以外的所有未跟踪手指关节;第七个传感器用于手掌。7传感器手套是Synertial专有的轴缩放技术。没有人成功提供可用的7传感器手套的原因是,以前没有人能够缩放传感器的单个轴(他们只能缩放整个传感器或什么也不能缩放)。我们的手套不仅可以独立地对每个轴进行插值,而且还可以使用户修改其速率以实现完美的贴合度(未经硬编码)。
13个传感器的手套:
我们的13个传感器的手套仅使指尖(指骨)可以插值。13-Sensor手套是全方位的手套,满足大多数应用需求,但在指尖上施加力会破坏肌腱内向力时,指尖受力会破坏自然插值。
16传感器手套: 除指尖小指以外的所有纯净数据。
可选的下臂和上臂传感器:由于许多手套应用都需要臂数据。

优势
几分钟即可更换手套大小,可拆卸电子装置
双手手套电子设备,用作左右手套
小指和环状掌骨传感器(Palm Flex)
自动手指测量系统
校准夹具
通过骨架修改编辑拍摄
用户对每个轴的骨骼运动进行缩放
用户修改的校准姿势
Palm Flex传感器

更多全身运动捕捉技术与生物、运动、机器人、人机工程、数字娱乐解决方案@南京合越智能,www.3xmaker.com
我们的13和16传感器手指动作捕捉手套现在包括一个附加的手掌弯曲传感器,可提高手指的根部和指尖的位置精度。没有其他动作捕捉手套能够提供如此全面的手掌弯曲度测量。
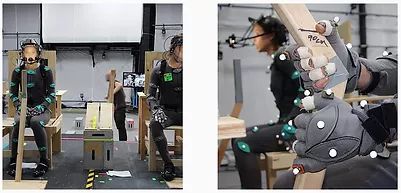
与Optical Rigs同步
Synertial的手指捕获解决方案专为Vicon的Blade和Optitrack的Motive软件而设计:
无阻塞的手指捕获:在多人合影时,手指几乎总是被阻塞;我们的Opticaptial Mocap手套可提供预先解析的手和手指数据,该数据与光学数据完美同步。
手套组合:根据需要混合7、13和16个传感器的手套对;
KINEXACT HAND:使用Kinexact-Hand软件进行准确的表演者手部骨骼测量;
即时校准:Synertial的校准手套在即时校准期间将手置于最佳姿势 ;
一台PC上四副手套:每台PC最多管理四副手套;
设备驱动程序:所有手套对均由MoBu中的单个设备驱动程序控制;
同步软件:由处理中心提供动力的独立同步硬件(无需额外的同步电源);
卡纸同步:低漂移同步硬件(每个会话卡纸同步一次或两次);
从内部刀片或动机:从内部刀片或动机触发开始和停止操作手套;
帧时间戳:精确的帧时间戳低至1/100秒,最高可达1000 FPS(29.97标准);
自动命名汇票:手套汇会自动与相应的光学名称共享相同的名称);
热插拔电池:无需重新启动或重新校准即可更换电池。

Synertial的校准管道

严格的IMU系统校准的关键组件:
测量:正确测量手指骨长;
结构:在初始化时,将演员骨骼的几何结构与匹配的校准文件中预先配置的几何结构进行精确匹配。
指骨长度测量
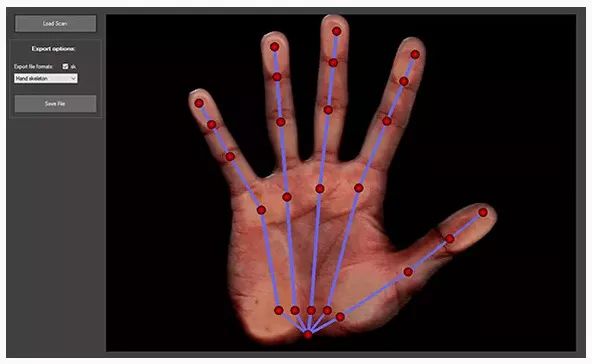
Synertial有一个工具可以自动测量指骨的长度:KINEXACT-HAND。Kinexact使用手动扫描以正确的关节位置和角度输出MoBu或基于Synertial格式的骨架文件。
初始化时用户和校准文件匹配

精确校准的第二个关键组成部分是将用户的段保持与初始化过程中预先配置的校准文件相同的姿势。
从理论上讲,一旦两者相同(除了精确的指骨长度),流处理过程就可以准确开始。
如果没有一种将用户的手指骨骼保持在这样的姿势的机制,这两个姿势的一致匹配实际上是不可能的。因此,Synertial已开发出校准夹具,Synertial的正在申请专利的校准夹具,该夹具可强制用户的手匹配预先配置的模板。
除了将Synertial的校准夹具局部锁定在所需的手部姿势外,演员还使用夹具上的水平仪根据重力对手进行整体定位,以提供初始化时的亚度精度。
这些工具可帮助专业人士依靠可重复且精确的校准,将猜测工作排除在成功的初始化过程之外。
更多全身运动捕捉技术与生物、运动、机器人、人机工程、数字娱乐解决方案@南京合越智能,www.3xmaker.com
咨询该商品价格
品名:数字工厂,机器人技术应用的动作捕捉手套cobra-gloves
其他商品
-
Xsens MVN Analyze惯性运动捕捉分
¥运动捕捉分析软件 -
ViveLab Ergo3D虚拟空间中的人体
¥运动捕捉,人机工程学 -
I-Scan接触压力分布测量系统
¥接触力压力分布测量