
产品介绍
开放式触觉遥操作机器人科研实验系统
应用实例
Omni Bundle是促进机器人和触觉技术教学并且兼容MATLAB/Simulink的机器人
§ 了解机器人和触觉技术的高性价比解决方案
Omni Bundle是一个高性价比的机器人,用于介绍机器人和触觉技术的中高级控制概念和理论。结合了Geomagic Touch™ (原SensAble Phantom Omni) 触觉装置,Quanser开发的 QUARC® 控制软件和课件,使学生更容易将理论知识转化成动手实践经验。
§ 新型机器人和触觉课程
课件材料涉及基本的机器人概念,例如正向和逆运动学建模, 雅可比行列式, PID 控制和和路径规划。也包含先进的触觉技术概念,例如力的计算, 碰撞检测和虚拟对象动力学。
课件提供基于触觉技术的练习实验,学生可以快速的建立基本虚拟环境,并以此为基础设计更复杂的多对象环境,多触点的触觉交互,力反馈,遥操作和协作触觉技术。
§ 工作原理
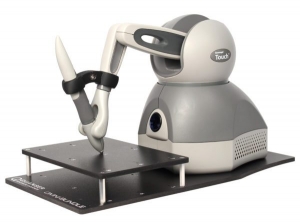
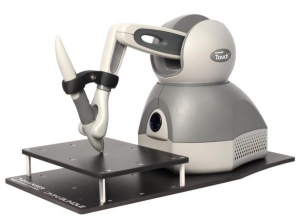
Geomagic Touch触觉装置是一个6关节机器人, 包括3个驱动关节和3个非驱动关节。
3个电机可以驱动末端器(-手写笔的顶端)跨越整个工作区域。通过数字编码器测量沿X,Y,Z轴的位置,电位器测量轴的旋转(俯仰,偏航和旋转)位置。
QUARC实时控制软件的模块库提供接口与设备的交互。
§ OMNI BUNDLE 工作站组成
Geomagic Touch™ (原SensAble Phantom Omni)
QUARC实时控制软件,兼容MATLAB®/Simulink®
快速入门指南,教师和学生手册(提供电子版)
预设的控制器案例和完整的动态模型
课程内容
§ 正向运动学和D-H参数
§ 逆运动学
§ 关节水平的PD 和 PID 控制
§ 轨迹规划(关节空间,任务空间)
§ 雅可比行列式推导及应用
§ 各种力学定律触觉演示(力场, 软接触和硬接触等)
特点
§ CE认证 Geomagic Touch (原 SenAble Phantom Omni) 触觉装置
§ 6DOF 位置传感
§ 便携式设计,占用空间少,使用地点灵活
§ 特别定制的可移动手写笔
§ 手写笔集成两个易于使用的瞬时开关
§ 增加腕托提高用户的舒适度
§ 针对接墨水瓶用于自动空间矫正
§ 完全兼容 MATLAB®/Simulink®
§ 完整的文档和控制器参数设置
§ 开放式控制器设计,用户可以自由设计控制器
设备参数
力反馈空间 (W x H x D)
设备桌面尺寸
设备重量
关节活动度
标称位置分辨率
额定最大输出力
连续输出力 (24 hrs.)
表现在笔尖惯性
力反馈
硬度
接口
160 mm x 120 mm x 70 mm
168mm x 203 mm
1.8kg
手腕旋转范围
>450 dpi / 0.055 mm
3.3N
0.88N
1.26N/mm (X axis) / 2.31 N/mm (Y axis) / 1.02 N/mm (Z axis
45g
x, y, z
以太网接口
工作站组成
设备
控制设计环境
文档
实时软件运行环境
控制器样本
Geomagic Touch™ (原 SensAble Phantom Omni) 触觉设备
Quanser QUARC® 兼容r MATLAB®/Simulink®
快速使用指南, 教师和学生手册
Microsoft Windows®
咨询该商品价格
品名:开放式触觉遥操作机器人科研实验系统
其他商品
-
franka Panda 7轴协作、触觉敏感
¥franka 协作机器人 -
开源ROS微型智能车无人驾驶与人工
¥车联网 无人驾驶人工智能 -
基于Husky与UR的复合操作移动机器
¥Husky UR