

产品介绍
RoboTouch机器人夹爪触觉测量系统
机器人触觉测量系统使机器人更智能、更精密——除了听觉、视觉、味觉之外,机器人又有了触觉。该系统广泛用于仿生机器人(四足、六足机器人、无人机、机器蛇等)、仿人机器人、医疗机器人研究及应用。是高校、科研院所、研究所、医院的科研和教学平台。

型号:RoboTouch
robotouch专利的电容式触觉传感技术是嵌入式触觉传感技术给工业和消费类机器人的夹具或人形机器人触觉“感”。
一、系统特点介绍:
1、基于Barrett Hand3D等机器人三指夹爪模型的传感器;
2、系统共用了7个传感器垫(手掌、指中、指尖);
3、每一个独立的感应垫用电容性压力传感技术构造;
4、每个传感器的数据通过一个专有的PSoC和I²C进行数据输出,确保了触觉应用时的高灵敏度;
5、可与用户的应用相结合或通过USB数据整合工具进行连接;
6、可作为一个基本的工具包或完全集成的解决方案。
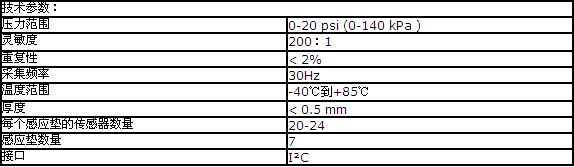
二、系统组成与技术参数
1、1个10x10mm手掌传感器(24个传感元件);
2、3个6x6mm指中传感器(24个传感元件);
3、3个6x6mm指尖传感器(22个传感元件)。
系统配置
★RT Basic 版:
☆7个适应 Barrett Hand3D 模型的传感器
☆一个 API 库(方便客户自定义安装)
☆可单独提供一个包含可视化软件的数据采集工具包
★RoboTouch 完整版:
☆RoboTouch 基础版
☆数据采集工具包和保护套装
三、应用案例

它是基digitacts传感器技术特点的嵌入式数字输出OEM集成到夹持器。传感器包括多个感测垫,每个通常有12-24传感元件,可以放置在任何位置的夹持器的选择。来自传感器的数据,通过我²C或SPI数字接口转移到夹持器,使您能够轻松整合进你的手爪传感器。
优势:
给你的机器人“触觉”能力
为你的机器人提供操作微妙物体的能力
通过减少抓力优化你的低功耗操作器
使用最敏感和可重复触觉传感器收集数据的机器人应用

参考案例
案例1:人形服务机器人
Twendy-One人形机器人,帮助老年人站立的基础上从人的握力和导游获得的反馈或协助日常工作的人。只有五英尺高,但是很强大,体重245磅的人破碎的手臂,Twendy-One也需要她坚强的温柔。
解决
robotouch传感器集成Twendy-One提供灵活性和“温柔的抚摸”到每个Twendy-One的手。这是归因于241 robotouch传感器集成到每个Twendy-One的手。
效益
Twendy-One现在有柔软的手和手指轻轻握,用足够的力量来提升人类和细微的动作,对人类的触摸互动。
Twendy-One是坚强,聪明,敏捷,但PPS传感器给她的感觉的能力,让她照顾我们残疾人的一个机器人和人口老龄化。
案例2:合作伙伴:柳树车库机器人手爪
挑战
柳树车库需要触觉传感器被嵌入到他们的个人机器人2(PR2)夹子帮助它拿起变化的对象,如银器和笔。
解决方案
robotouch传感器被设计为使用开源的PR2机器人硬件平台。
传感器设计的PR2的夹具体的形状。
完整的系统组件包括夹持器、传感器、和耐用、防滑、保护层即插即用与PR2平台。
效益
传感器包括22种不同的触觉传感元件覆盖所有可能的接触面PR2的夹持器。
使用一个接口,RoboTouch传感器提供高质量的量化数据如何努力把握,PR2接触时,让它学会各种微妙的对象。
案例3:应用:barretthand机器人手
挑战
巴雷特的手是一个多指可编程的抓手与敏捷获得不同大小的目标物体的形状,和方向。
巴雷特需要提高自己的barretthands允许灵巧的操控在高度敏感的应用范围从机器人手术修复任务的空间。
解决方案
巴雷特整合到他们的barretthand robotouch传感器提供了触觉。
更多柔性传感器技术和产品科研和创新研发解决方案,欢迎来电联系交流。
咨询该商品价格
品名:RoboTouch机器人夹爪触觉测量系统
其他商品
-
OpenCV软硬一体人工智能机器视觉
¥人工智能机器视觉 -
XELA机器人触觉传感器uSkin
¥机器人触觉传感器 -
Minco SmartHeat SLT 薄膜柔性加
¥Minco 薄膜柔性加热器