
新品上架
-
头枕、靠垫、座椅、床垫设计
¥压力分布测量系统,压力感应垫 -
柔性压力垫压力测量系统
¥柔性压力传感器 -
Xsens MVN Analyze惯性运动捕
¥运动捕捉分析软件 -
ViveLab Ergo3D虚拟空间中的
¥运动捕捉,人机工程学

产品介绍
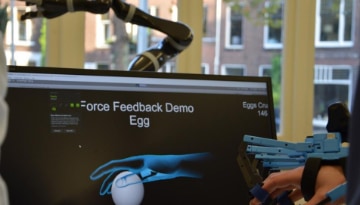
SenseGlove力反馈数据手套

SenseGlove提供虚拟和增强现实中自然的互动。使用SenseGlove可以将虚拟对象带到现场,用户可以感受,触摸和与它们交互,就好像它们是真实的一样。

1、虚实交互存在的问题:
当涉及到沉浸感时,如果遇到某些需要使用控制器来完成的操作,我们通常只是用手完成任务,而没有任何感知。虚拟现实中的日常体验,如开门或关门,如果我们完全感受不到物体的阻力,这将会破坏虚拟世界中的真实感。
2、应用场景:
无论是VR培训、遥操作机器人还是科学研究,SenseGlove触觉力反馈手套都可使虚拟世界更具沉浸感和吸引力。借助我们的硬件和直观的软件开发工具,研究人员和开发人员可以创建真正的触觉交互。
★培训领域
传统的培训可能既昂贵又风险高。有了SenseGlove触觉力反馈手套,就可以进行虚拟培训,而效果与实际培训相同。用户可进行高性价比的沉浸式VR训练,并获得物理肌肉记忆力和保持力体验。

力反馈SenseGlove力反馈系统是学习VR中复杂任务的组件之一。与传统的虚拟现实训练相比,可感觉到虚拟物体的大小、密度,并可以减少错误的发生。
触觉震动力反馈SenseGlove震动力反馈可实现诸如按钮点击和冲击模拟之类的交互,这对于使用工具和仪表板进行虚拟现实训练至关重要。
概念验证程序借助定制的概念验证程序,SenseGlove触觉力反馈手套可帮用户实现触觉VR培训。
★VR / AR模拟领域

触觉XR是人因工程仿真的下一个前沿领域。在不损失逼真度的情况下,可使用VR / AR仿真评估产品设计的人体工程学性能和生产制造可能性。使用SenseGlove触觉力反馈手套进行数字原型设计可降低成本并缩短迭代时间。
节省时间创建物理模型耗时,因此要进行迭代。模拟的模型允许用户立即测试更改。
成本效益SenseGlove提供了少数量的触觉控制和响应集,以确保与数字原型的自然交互。
★研究领域
SenseGlove触觉力反馈手套让新一代的研究人员可以轻松实现沉浸感。用于Unity Engine的广泛的即插即用软件开发套件(SDK)允许在VR中创建触觉交互,几乎不需要编写任何代码。对于像Telerobotics这样的更深入的研究,SenseGlove力反馈数字手套提供了本机C ++ SDK,可实现数据收集自由度。
即插即用通过即插即用的连接功能,收集数据变得简便。下载SDK,连接SenseGlove即可开始。
可订制化用户只需在GitHub上找到软件开发套件(SDK),即可轻松进行研究。
3、产品介绍
SenseGlove DK1

产品包含部件

左手&右手手套
2x 3米 USB 线缆
1x 2米 USB 线缆
1x 电源线
2x HTC vive 头部追踪器
1x 手册
可选无线装备

蓝牙4.1带有蓝牙4.1协议和串行接口,SenseGlove可以输出信号速率为60hz(120hz有线)
3150h毫安锂电池3150 mAh电池可持续使用至少1个小时,通常会持续2到4个小时。
2x 无线KIT
2x 1米USB线缆
1x 手册
可兼容软件
Unity Plugin
Unreal Plugin
Native c++ SDK API
ROS Plugin
4、技术规格:
1. 数据手套:九轴传感器,20个外骨骼旋转传感器,对应手部的每个关节
2. 力反馈参数:五个被动式力反馈模组,指尖伸展方向最大40N,平均每个编程步骤0.4N的力分辨率
3. 振动反馈参数:每个指尖搭载最大0.8G振动电机,位于数据手套掌心的一个触觉执行器,用于7.3G冲击模拟
4. 使用电流:数据手套电流峰值2.8A,每只数据手套平均使用1.5A,不适用力反馈时,每只数据手套使用0.18A
5. 通信模式:USB串口通信
6. 刷新率:100 HZ
7. 重量: 每只数据手套约300克
8. 尺寸: 长 250mm x 宽 140mm x 高 50mm
9. 提供C ++ 软件开发工具包(SDK), 可用于Unity。
应用案例:
医疗康复训练;
虚拟装配培训;
样机评审;
遥操作机器人。

样机评审

虚拟装配培训

医疗康复

遥操作机器人与人机交互研究
更多人机交互感知与测量解决方案@南京合越智能,www.3xmaker.com
咨询该商品价格
品名:SenseGlove力反馈数据手套
其他商品
-
SenseGlove力反馈数据手套
¥SenseGlove,力反馈数据手套 -
Manus Prime II Haptic触觉手套-
¥Manus 触觉手套 -
Synertial Mocapsuit光学惯性混合
¥光学惯性混合动作捕捉