

产品介绍
最流行无人系统ROS机器人平台——Autolabor Pro1
Autolabor Pro1是由清华大学科研团队打造的无人系统平台,该平台已在清华大学、北京大学、北京航空航天大学、中国农业科学研究院等高校与科研机构得到广泛使用。该平台可用于图像识别、智能驾驶、智能网联、无人系统、智能机器人与群体智能等项目的验证与实验。
产品介绍

Autolabor Pro1是一款室内外均可流畅作业的机器人移动底盘,具有强通过、高负载、高精度、高扩展、动力足和续航长等特点,可跨平台开发,支持多种应用场景。
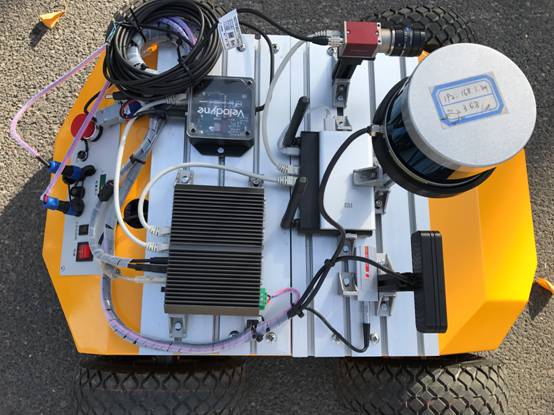
该平台上可集成激光雷达、摄像头、GPS等传感器,云台、机械臂、抓持器等附件设备,基于平台可实现自主路径规划导航、障碍物避障等功能,适用于巡检、抓取、智能驾驶、协同控制、计算机视觉、深度学习等技术的研究与应用。

该平台提供底层驱动和基于ROS平台的API接口,精准的PID控制与运动模型,方便您的硬件集成和二次开发,并提供手机APP可对车辆进行远程操作控制。
产品特性




可靠耐用,操作简单,无需组装,直接使用
高通过性,爬坡能力十足,续航能力强
高精度工业级编码器,控制定位精准
高负载,负重可达50KG
适应场景广泛,室内外均可使用


兼容多个系统 - Windows/Linux
支持ROS开发,提供ROS驱动包与运动模型
雷达、摄像头、惯导等多种传感器随意组合搭配,拆装方便,并配有专用传感器电源

使用文档齐全,配备后续用户支持,并不断更新开发教程
可实现图像识别、SLAM、Cartographer等
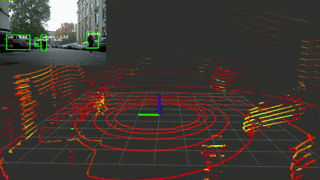
雷达与图像的数据采集识别

雷达建图过程

雷达建图结果
产品参数
支持ROS 是
尺寸 726*617*273mm
最大速度 0.8m/s
负载能力 直线50kg/原地转弯30KG
适用地形 全地形
垂直越障能力 8cm
爬坡能力 25°
续航时间 2.5h/4h (选配)
驱动转向 四驱差速转向
控制方式 手柄/上位机串口
支持系统 Windows/Linux/MacOX
支持平台 X86
手柄控制 20m
手柄通信 2.4Ghz
---------------------
作者:Autolabor
来源:CSDN
原文:https://blog.csdn.net/autolabor/article/details/79076920
版权声明:本文为博主原创文章,转载请附上博文链接!
咨询该商品价格
品名:最流行无人系统ROS机器人平台——Autolabor Pro1
其他商品
-
franka Panda 7轴协作、触觉敏感
¥franka 协作机器人 -
开源ROS微型智能车无人驾驶与人工
¥车联网 无人驾驶人工智能 -
基于Husky与UR的复合操作移动机器
¥Husky UR