

产品介绍
Compass C2 四轮差动平台

产品简介
Compass系列机器人平台,是基础型的小型机器人平台,旨在以高的性价比为客户提供一个完整、多接口、高可靠性的移动机器人系统。Compass C2是四主动轮差动轮系的机器人平台,使用HSL-15橡胶轮胎,配置强劲的驱动系统,能够适应各种应用环境,并能高性能地实现各种运动。平台底盘采用整体铝合金铸造成型工艺,使用四台大功率的空心杯电机作为驱动,并配有多轴伺服驱动器,支持CAN总线及RS232接口。开发包向用户提供完整的设备通信协议以及基于STM32F407的示例与演示程序源码,使用户能够对Compass C2快速上手。
特性
四轮独立驱动铝合金整体成型底盘工业级橡胶轮胎空心杯直流伺服电机伺服驱动器DEMO开发板及应用代码
外形尺寸
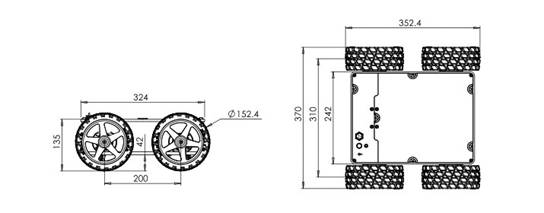
规格参数
机身形式: | 铝合金一体成型 | 外形尺寸: | 352.4×370×135 |
驱动轮: | HSL-15橡胶轮 | 驱动轮直径: | 152.4mm |
驱动方式: | 四轮独立驱动 | 悬挂形式: | 无悬挂 |
车身最小离地间隙: | 42 | 整机重量: | 9.9kg |
额定负载能力: | 30kg | 电机类型: | 空心杯直流伺服电机 |
电机额定功率: | 30W | 电机编码器: | 500线/转,A、B相输出 |
电机数量: | 4 | 电机驱动: | 伺服驱动器,CAN总线、RS232通信接口 |
最大移动速度: | 1.2m/s | 最大自转速度: | 215°/s |
最小转弯半径: | 0m | 适应的地形: | 室内、室外普通路面及泥泞路面 |
典型续航时间: | 约8h(负载5kg,运行速度1m/s,运行率70%) | 待机时间: | >30h |
车载电源输出: | 5V@2.5A / 12V@2.5A / 电池电压(22.4~29.2V)@>5A | 电源保险管预设规格: | 5×20/10A |
电池: | 24V/7.8Ah锂离子电池 | 电池快速更换: | 支持 |
充电器: | 输入:AC220V~240V / 充电电流:3A / 接口:直插式 | ||
DEMO开发板: | RHF407开发板(CAN×2,RS232×2,TTL×1,RS485×1,SPI×1,I2C×1,ADC×8,DAC×2,PWM×8,LED×2,按键×2, 独立I/O×24,可复用I/O×29,TF卡接口×1,RTC后备电池座,可复用TFT LCD接口×1) | ||
附件: | 电池充电器、ULB-1超声传感器×5 | ||
典型部件

HSL-15橡胶轮

HFmotor-3230空心杯直流伺服电机

IMDR4伺服驱动器

RHF407开发板

ULB-1超声测距传感器
产品展示

Compass C2

Compass C2

Compass C2局部细节

Compass C2局部细节
视频展示
研究方向
模式识别技术研究电子工程实验搬运与仓储应用路径规划技术研究机械工程实验监控与侦查应用自动驾驶技术研究嵌入式系统开发与实验机器人竞赛传感器技术研究图像处理技术研究地图绘制应用人工智能技术研究多机器人合作技术研究柔性制造系统应用
可选附件更多...
HMC-01遥控手柄LPC-16巡线传感器ULB-1超声测距传感器激光雷达GPS定位器Kinect体感传感器
咨询该商品价格
品名:Compass C2 四轮差动平台
其他商品
-
franka Panda 7轴协作、触觉敏感
¥franka 协作机器人 -
开源ROS微型智能车无人驾驶与人工
¥车联网 无人驾驶人工智能 -
基于Husky与UR的复合操作移动机器
¥Husky UR