
产品介绍

人工智能机器人应用研究与模块化开发平台
本解决方案集主要呈现了Baxter、Sawyer 两款机器人在多个研究领域的部
分典型应用案例、科研论文、应用套件,旨在分享各研究领域基于Baxter、Sawyer
所做的研究成果,拓宽Baxter、Sawyer 使用用户的研究思路,提供借鉴参照,
加快研究工作者相关课题项目开发进程。
方案集基于Baxter 和Sawyer 的主要科研研究方向:运动学和运动规划、人
机交互、机器学习、自动化控制、机器视觉、计算机视觉、机电一体化操作7
个方面展开,为了便于复现应用,南京合越智能针对每个方向都提供了可操作性强的应用
开发套件供用户选择,同时每个方向配有论文集、视频集供用户参考。欢迎来电咨询。
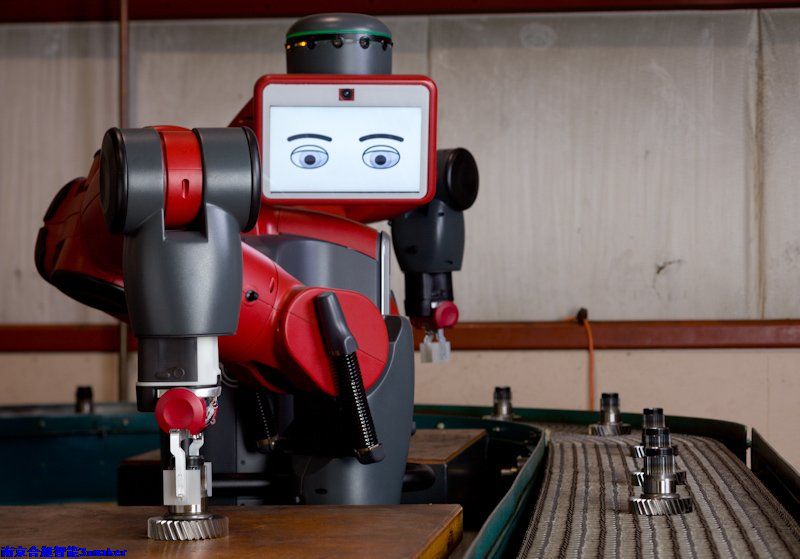
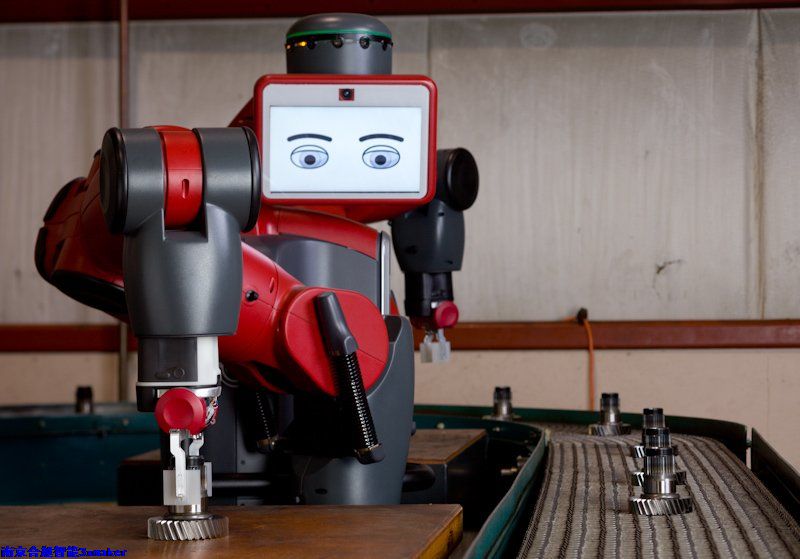
一、双臂协同智能机器人Baxter
Baxter 机器人是一款双臂协同智能机器人,每个手臂有
7 个运动关节,双臂共14 关节,同时头部具有2 个关节。Baxter 机器人手臂采用SEA 柔性
关节技术,区别传统刚性机械臂,具有本质上的安全协作性。
Baxter 拥有丰富的高精度感知硬件,如手臂摄像头、头部摄像头、手部深度探测、超声
传感器、嵌入式关节力矩传感器等,是一个具备多模态感知能力的智能机器人。
Baxter 拥有开源的ROS 机器人系统,提供丰富的SDK,是进行人工智能及机器人研究、
机器人工程教学、科学普及展示等极具创新价值的应用平台。
“Baxter 受到美国时代周刊等周刊的连
 载推荐,正在全球知名学府、机构广泛应用,为世界智能科学技术做出其应有的贡献。
载推荐,正在全球知名学府、机构广泛应用,为世界智能科学技术做出其应有的贡献。
科研案例精选:
1、基于Research 版Baxter 智能机器人,结合智能语音技术和Baxter 控制算法实
现语音、表情、姿态动作等人机交互。
2、基于Research 版Baxter 智能机器人,结合远程遥感控制技术,实现对Baxter
机械臂的远程控制。
3、基于Research 版Sawyer 智能机器人,融合VR 技术与远程遥感控制技术,实
现对机械臂的远程虚拟增强控制。
4、基于Research 版Baxter 智能机器人,展示Baxter 在人工智能方面的应用,Baxter
不仅仅是一个可试教的机器人,采用人工智能技术,能使其拥有不逊于人类的大脑并具备可
观测环境变化的眼睛。
5、基于Research 版Baxter 智能机器人,结合机械臂运动学IK 解算,AI 基础算
法等实现人机博弈。
6、基于Research 版Baxter 智能机器人,结合深度视觉技术、图像与机器坐标转
换、机械臂运动学IK 解算,实现机械臂的手势同步控制。
二、多模态感知能力的智能机器人Sawyer
Sawyer 拥有丰富的高精度感知硬件,如手臂摄像头、头部摄像头、嵌入式关节力矩传
感器等,是一个具备多模态感知能力的智能机器人。
Sawyer 拥有开源的ROS 机器人系统,提供丰富的SDK,是进行人工智能及机器人研究、
机器人工程教学、科学普及展示等极具创新价值的应用平台。
Sawyer 正在全球知名学府、机构广泛应用,为世界智能科学技术做出其应有的贡献。
科研案例精选:
1、基于research 版Sawyer 智能机器人,综合了计算机视觉技术、机械臂运动控
制学、机械臂电机驱控PID 算法。视觉系统自主规划迷宫球在迷宫盘内起点到终点的路径,
并实时分析当前球的位置,机器人根据视觉位置信息完成机电控制,调整迷宫盘姿态,完成
迷宫逃生。
2、基于Research 版Sawyer 智能机器人,结合深度视觉技术、图像与机器坐标转
换,实现机械臂的姿态、运动同步控制。
3、基于Research 版Sawyer 智能机器人,结合人脸识别算法与头部关节控制,实
现实时的人脸跟踪。
4、将10 自由度机械夹爪与Sawyer 结合,基于TP-GMR(任务参数化高斯混合回归模型)
的示教编程技术,开展了Tray 清理任务演示。
三、多模态感知智能移动协作机器人平台
咨询该商品价格
品名:基于 Baxter、Sawyer的人工智能机器人应用研究与模块化开发平台
其他商品
-
franka Panda 7轴协作、触觉敏感
¥franka 协作机器人 -
开源ROS微型智能车无人驾驶与人工
¥车联网 无人驾驶人工智能 -
基于Husky与UR的复合操作移动机器
¥Husky UR