

产品介绍
人工智能与智能机器人综合应用实验室建设解决方案

南京合越智能@DOBOT
课程体系:联合清华大学、哈工大、山东大学、中科院等机器人、人工智能领域高校,结合智能工商业院校自身行业背景和专业建设需求,提出专业课程建设建议。可共同开发教材,在新结构、新方法、新应用等方面组织跨学校、跨专业的课程方案编制小组,共同打造智能工商业专业的课程体系,实现互联网+,智能机器人+,人工智能+,等多种格局的专业培养方案。
方法与实施
1、理论体系 人工智能技术、机器人载体构建理论体系
2、项目训练 项目化载体、构建多层次多项目训练体系
3、环境建设 工程化环境、建设真实性综合创新实验室
4、团队建设 团队式指导、组建校内外多背景指导团队



1. 产品介绍
A. 人工智能技术应用开发平台
概述
人工智能技术应用开发平台包含Arduino人工智能入门套件、人脸识别方案、指纹识别方案、科大讯飞语音识别方案,是一款与时俱进的人工智能学习平台。
课程教学内容介绍:
这套人工智能实训台的学习课程可以分为三个阶段:初级阶段、中级阶段
初级阶段教学是让学生对嵌入式开发有一个初步的了解,巩固C语言的基础,学生通过我们公司提供的Arduino人工智能入门套件,可以学到Arduino Mega2560实验开发板的全部功能,同时,我们提供丰富的接口和Demo,学生可以进行二次开发,如通过Arduino开发板控制Dobot Magician机械臂和控制移动底盘小车。
中级阶段教学是智能硬件的教学,通过这一章课程的学习,学生可以掌握Python语言和一些基础的Linux系统知识,学生还可以学习到语音识别的基本原理,如何搭建语音平台,语义解析等知识。最后,我们给出一个在Linux环境下编写Python语言用语音控制机械臂和控制移动底盘小车的Demo,学生可以在这基础上进行二次开发。
高级阶段教学是对人工智能学习的一个综合教学,要求学生要有一定的C++语言基础和Qt界面开发的基础,学生在这一章的课程学习中,可以接触到人脸识别和指纹识别的基本原理和基本算法,包括特征提取和匹配算法、人脸识别几何特征结算等,我们提供了一个用Qt界面写的一个人工智能控制系统,学生可以在此进行二次开发。
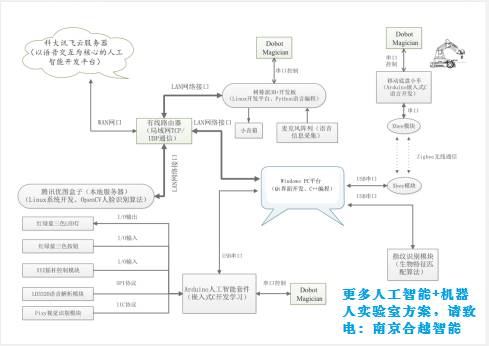
从整体的系统框图,主要包含Arduino人工智能套件,用于嵌入式C语言的学习开发;包含树莓派3B+开发板,用于学习Linux系统开发、Python语言的学习开发、讯飞云服务器平台的学习;包含移动底盘机器人,用于无线通信方面的嵌入式开发学习,
功能特点:
人工智能技术应用平台,集成了语音识别系统、智能机器人、本地 Linux 服务器、云机器深度学习平台。
移动机器人,指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的机器人,以可充电之蓄电池为其动力来源。一般通过控制器,包括电脑或嵌入式系统来控制其行进路线以及行为,或利用颜色轨道、电磁轨道来设立其行进路线。移动机器人根据轨道和标识进行移动与动作。
竞赛移动机器人采用嵌入式控制系统,搭载巡线传感器、颜色传感器、红外传感器,同时具有多路数字量和模拟量传感器扩展接口。移动机器人可以实现巡线、识别颜色、避障功能,同时具有串口通讯功能、无线通讯功能。
在竞赛平台中,移动机器人将会搭载智能机械臂。

移动机器人
机械臂是指可以实现高精度、高速、多姿态运动的机电装置,机械臂是一个多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性, 在工业装配、搬运、焊接、加工等领域得到广泛应用。
机械臂是一个复杂系统, 存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务, 需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿
比赛采用智能机械臂,具有4个自由度,电机和关节采用减速机连接,通过编码器和角度传感器采集位置反馈。机械臂采用驱动控制一体化设计,控制及驱动集成在机械臂的底座内,体积小,安装方便。机械臂可以通过笛卡尔坐标系指令、关节坐标系指令来控制,同时具备数字量和模拟量I/O,以及高速脉冲输出。机械臂末端可以快速安装夹爪或者吸盘,配合完成不同的取放动作。竞赛环境中,智能机械臂安装在移动底盘上,完成对物件的抓取工作。该平台具体参数如下:

图 智能机械臂
语音识别的应用领域非常广泛,常见的应用系统有:语音输入系统,相对于键盘输入方法,它更符合人的日常习惯,也更自然、更高效;语音控制系统,即用语音来控制设备的运行,相对于手动控制来说更加快捷、方便,可以用在诸如工业控制、语音拨号系统、智能家电、声控智能玩具等许多领域;智能对话查询系统,根据客户的语音进行操作,为用户提供自然、友好的数据库检索服务,例如家庭服务、宾馆服务、旅行社服务系统、订票系统、医疗服务、银行服务、股票查询服务等等。
平台采用语音识别模块,实现语音下达购物指令,由中控系统根据指令,调度移动机器人实现自动取货。


图 语音识别模块
(5) 人工智能基础套件
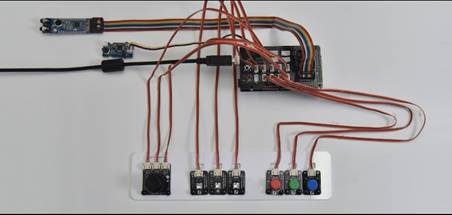
采用开源硬件Arduino作为开发板,集成了语音、视觉、操控摇杆、LED灯组等多种输入输出,方便用户快速掌握智能硬件 开发过程。更高的性价比,可以实现实验室多台套配置更好的安全性,更加适合于教学使用,操作界面友好更,适合刚刚接触机械臂的教学任务具有良好的柔性和多样化的工作方式通过不同的搭配应用,实现多种使用环境
采用高性能 PC 机,安装 Linux 服务平台作为语音、视频识别的本地处
2. 创新工程坊建设
创新工程坊因其环境设计、设备和工具、开放性、多学科性、展示性、社交性等方面的优势,是支持学科专业建设、教学科研、科技活动及创新创业的重要场所。深圳市越疆科技有限公司以人工智能和机器人技术作为特色,围绕学科专业人才培养目标,根据用户的特点和需求,定制不同层次、不同侧重的创客空间方案。创客空间主要由以下功能区组成:
教学制作区:主要用于日常教学、讨论、组装、设计、调试,是学生学习并进行实践操作的主要场所,区域内的工作台、桌椅等按实际需要制作;
加工制造区:主要摆放不便随意移动的工具设备,如 3D 打印机、小型机床、激光雕刻机、焊台等;
器材工具区:主要用于收纳和存放各类器材、小型工具和耗材;
交流分享区:结合多媒体设备和互联网技术,方便学生之间及师生之间的交流、分享和讨论,集思广益,迸发出创新的火花;
作品展示区:主要用于优秀成果的展示,一方面树立典范,激发团队的上进心和创造力,另一方面为了分享和交流,互相学习。
 |  | ||
3. 成功案例
A. 清华大学
项目名称:人工智能实验室
学院专业:基础工业训练中心
背景介绍:人工智能与机器人创新创业实训平台整体解决方案,是越疆科技基于长期对教育与人才培养模式的研究,结合智能科学的发展要求及高校教学实际经验,以越疆相关产品为基础的实验室建设方案。目的是为了建设一个能够以大学教学课程标准为指导、以理论和实践相结合为手段、以技术教学的完整教学课程体系为依托的人工智能实验室,该实验室旨在通过开放的学习和实验环境,丰富的人工智能与智能科学的前端技术,达到培养具有较强人工智能基础人才的目的。实验室整体解决方案预期目标是:
Ø 掌握人工智能基本原理与知识
Ø 掌握机器学习过程
Ø 掌握常用机器学习方法
Ø 掌握一般图像处理方法
Ø 掌握图像深度学习算法
Ø 掌握视频机器学习算法
Ø 掌握语音识别算法及使用方法
Ø 掌握机器人基本原理
Ø 掌握机器人运动学原理
Ø 掌握机器人控制技术
Ø 掌握智能机器人通讯技术
Ø 掌握移动机器人运动规划方法
Ø 打造理论与实践相结合的形象性教学课堂
Ø 增强学生学习的主动、实践与创新性
Ø 使学生对理论知识的理解更加直观化
Ø 提高“教”与“学”的相互交叉性
Ø 搭建硬件与软件结合的实验基地
Ø 真正实现“教”、“做”、“学”、“用”一体化

B.山东大学
项目名称:智能物流系统实验体系&排爆机器人
学院专业:基础工业训练中心
背景介绍:山大工业基础训练中心主要培养从事机械工程领域的设计制造、科技开发、应用研究、运行管理等装备制造业领域的高级工程技术人才。2016年底准备引入十套教学机器人,但考虑到工业级的产品成本、操作等因素,最终选择DOBOT机器人的教学器材。
实验内容:整个系统参考亚马逊Kiva机器人工厂进行智能化物流分拣与管理,具体设计流程如下:
扫码分类:机械臂+扫码枪+视觉系统,有2条物流线,每条线2套机械臂运作。一套机械臂+视觉找到传送带上物体的条形码位置,另一套设备加上扫码枪扫码,并将数据录入系统。
贴标签:机械臂+视觉+吸盘,将每个传送带货物贴上区域标签
 |
存储:机械臂+视觉+爪子,将物体按照区域存储到不同位置
C.西安交通大学
群视觉机器人柔性智能制造系统
项目名称:课题研究-群视觉机器人柔性智能制造系统
学院专业:CAD/CAM重点实验
背景介绍:西安交通大学设计系学生用于实验室课题研究-智能工厂,该课程设计的目的是为了实现工厂自动化、智能化的生产与管理。
实验内容:
1、基于DOBOT做了视觉系统开发
2、区分不同大小、颜色的物料
3、在流水线上,DOBOT承担物料的搬运、物品的组装、拆装等工作。
D.上海交通大学
项目名称:基于机械臂的Labview视觉教学
学院专业:工程训练中心
背景介绍:用于上海交大大工科专业的教学选修课程,学院计划开设《Labview视觉教学》课程,2017年下半年开设6次课程,每次课程2天,每次30人;让学生通过对机械臂的二次开发把理论知识付诸到实践中。
实验内容:
DOBOT Magician 3D模型的搭建
DOBOT Magician 3D模型运动仿真
运动学正、逆解算
机械臂末端运动路径规划
步进电机原理与应用
转矩计算与电机选型

咨询该商品价格
品名:DOBOT全感知人工智能与智能机器人综合应用实验室建设解决方案
其他商品
-
franka Panda 7轴协作、触觉敏感
¥franka 协作机器人 -
开源ROS微型智能车无人驾驶与人工
¥车联网 无人驾驶人工智能 -
基于Husky与UR的复合操作移动机器
¥Husky UR