
产品介绍
Allegro四指灵巧手
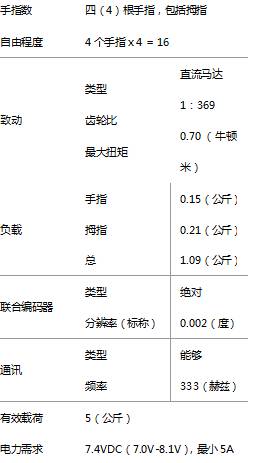
它有四个手指和十六个独立的扭矩控制关节,是抓握和操纵研究的平台。
更多灵巧手与抓握传感器解决方案@南京合越智能科技有限公司 www.3xmaker.com
特征
≫轻巧便携的拟人化设计
≫低成本灵巧操纵及其在研究和工业中的应用
≫多种即用型抓取算法,能够处理各种物体几何形状
能够承受5公斤的重量
≫ 16个独立的扭矩控制接头(4个手指x 4)
e Allegro手动控制台应用程序,用于基于仿真的算法原型设计和硬件测试
≫支持实时控制和在线仿真
Allegro Hand具有16个扭矩控制的自由度,可以牢固地抓握和操纵形状和大小各异的物体。

更多灵巧手与抓握传感器解决方案@南京合越智能科技有限公司 www.3xmaker.com
购买选项
[包含]
·灵巧手本体手(左手或右手)
·Allegro手动控制台应用程序(linux / Windows)下载说明
·Allegro手动控制台应用程序(linux / Windows)单用户许可证
·灵巧手底座
·CAN /电源线*(仅端接)
·2mm六角扳手
·备用螺丝和电线端子
·硬质塑料盒
· 电源供应
* Allegro Hand不附带CAN接口。如果您在选择指南时需要一些指导,请随时与我们联系。
用于Allegro Hand的BioTac传感器套件

产品页面: 用于Allegro手的Syntouch BioTac套件
特征
· 多模式触觉
· 可用于发展智能反射
· 安装简单
系统内容
· 4个BioTacs
· 4个Allegro手动适配器
· 电缆线
· 4个测试核心
· BioTac维护套件
· 开发套件
Weiss触觉传感器
产品页面: WRT 104-用于Allegro手的触觉传感器系统。
特征
· 指尖形设计
· 集成传感器控制器
· 超紧凑设计
· 易于安装
细节
· 传感器单元:4 x 8(32)
· 空间分辨率:3.8mm
· 最低触发水平(典型值):5kPa
· 满量程(典型值):85kPa
· 模拟分辨率:12Bit
· 读取速度:400帧/秒
· 电源:5V / 50mA
· 接口USB 2.0(CDC配置文件)
· 温度范围:0至40°C
· 电气连接4针FFC,0.5 mmpi
· 尺寸(长x宽x高):37.5 x 23.3 x 18.9毫米
· 重量:15克
咨询该商品价格
品名:Allegro四指灵巧手
其他商品
-
franka Panda 7轴协作、触觉敏感
¥franka 协作机器人 -
开源ROS微型智能车无人驾驶与人工
¥车联网 无人驾驶人工智能 -
基于Husky与UR的复合操作移动机器
¥Husky UR