

产品介绍
多机器人集群编队、跟随、追踪UWB定位系统LinkTrack
“既能够知道你在哪里,也能知道我在哪里,这是多么美妙的体验”
——“GPS之父”帕金森曾夸赞“北斗”系统
对于集群编队多机器人应用场景,PNTC(定位、导航、通信、授时)是协同运动的要点与难点,一般需要使用多套方案去实现该功能。因实现过程复杂、系统臃肿庞大、项目投入成本高,实际应用中很难标准化与产品化。

一、产品介绍
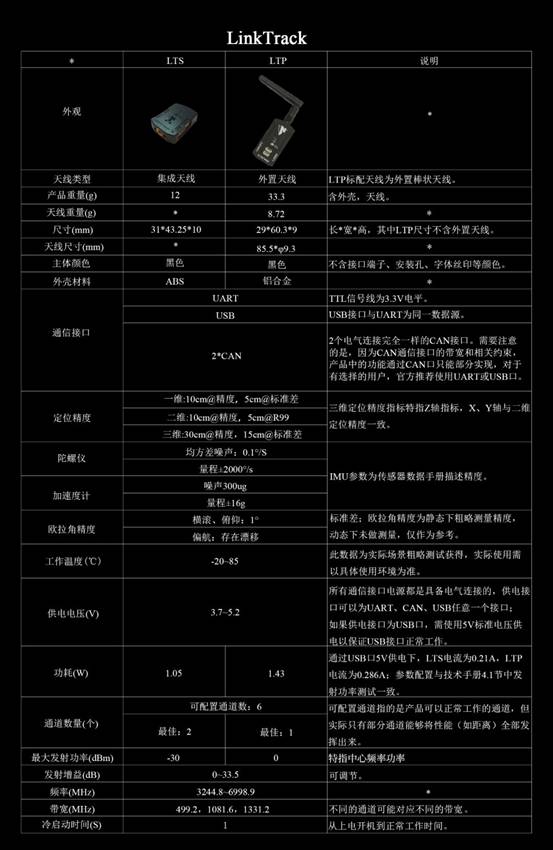
LinkTrack是一款基于UWB技术的PNTC(定位、导航、授时与通信)局部定位系统。支持1维、2维、3维定位,1维、2维典型定位精度10cm,第3维典型定位精度30cm;同时支持40个标签,120个基站定位。支持分布式测距与数传,实现不受地域限制的集群编队;支持纯数传模式,带宽高达3Mbps。
通过LinkTrack系统,为机器人集群编队应用提供一体化的PNTC功能,将大幅度为集群编队场景用户降低标准化与产品化难度。
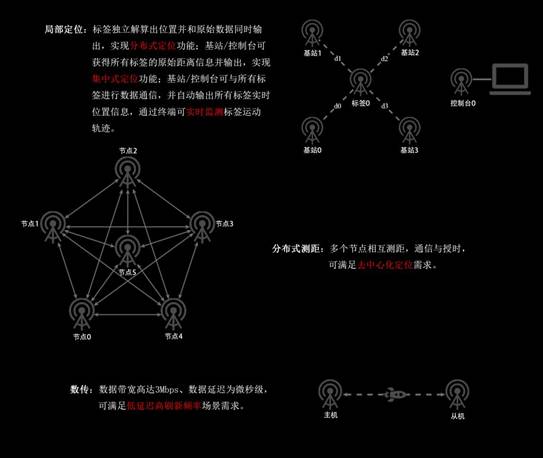
LinkTrack 是一款基于 UWB 技术的多功能系统,支持 LP(局 部定位)、DR(分布式测距)、DT(数传)三种模式,支持配置 为标签、基站等多种角色。
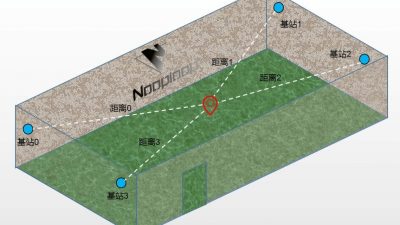
LP 是支持定位、导航、授时与通信(PNTC)一体化功能的实 时定位模式,分为标签、基站、控制台三种角色。标签实时测量并进行坐标解算,输出自身测距、 坐标等信息,基站与控制台实时输出所有标签的定位信息。支持 1、2、3 维定位,典型 1 维、2 维定位精度 10cm,典型第 3 维定位精度 30cm;定位频率高达 200Hz,基站容量多达 120 个,标 签容量多达 200 个(默认开放 40 个标签容量,更多容量需申请开放)。
DR 是支持测距、授时、通信一体化的分布式测距模式,只有节点一种角色。典型测距精度 为 10cm,刷新频率高达 200Hz,节点容量多达 50 个。
DT 是无线数传模式,分为主机与从机两种角色。数传带宽高达 3Mbps,延迟低于 0.5ms。
二、产品功能与特点:
基于 UWB(超宽带)通信技术,
定位、导航、授时、通信一体化,
局部定位、分布式测距、数传三种模式,
同一硬件可灵活配置为标签、基站等不同角色,
高容量:10Hz下,40标签/120基站/1控制台,
高速低延迟数传模式,带宽3Mbps,
节点自动无线组网,即插即用,
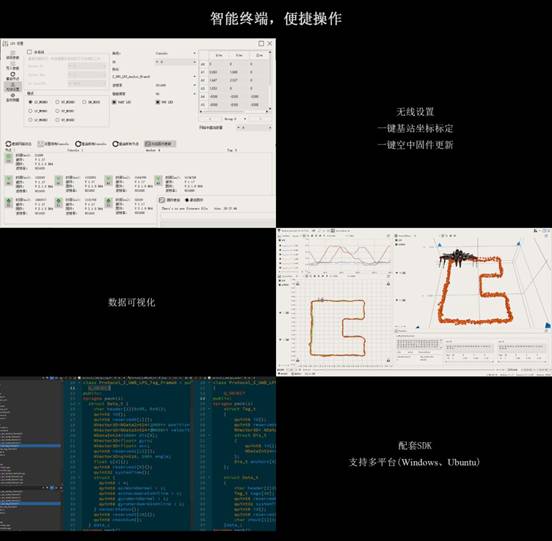
一键标定基站坐标,
无线参数配置 一键固件升级,
伪GPS应用,支持NMEA-0183协议输出,
内嵌三轴陀螺仪、三轴加速度计,
多频段,发射增益可调。

特色功能
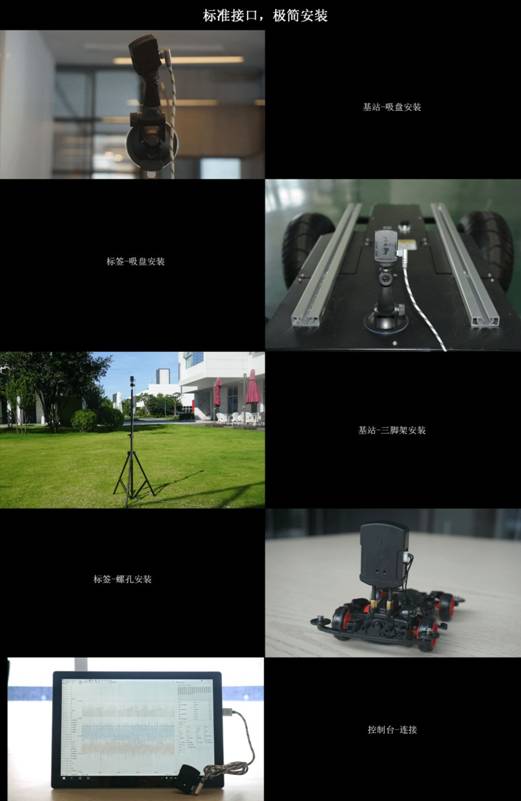
1、一键标定
为方便用户使用,仅需向系统内任意一个基站或控制台发送【坐标测量】指令,系统将自动完成基站标定工作并对配置进行保存,真正做到轻松部署,快速上手。
2、伪GPS定位
LinkTrack UWB定位系统支持NMEA-0183协议输出,使用定位标签直接替换原待定位对象的GPS,在无需做任何二次开发情况下,即可获得比GPS更高的定位精度及刷新频率。
3、ROS支持
连接任意定位节点,运行LinkTrack ROS 开源驱动包,即可订阅实时定位信息,无需处理底层通信与数据解析,使ROS开发者在短时间内实现机器人高精度定位导航成为可能。
模式
上位机
数据可视化;
支持实时多路数据波形、二维及三维轨迹、姿态等数据呈现形式;
数据录制回放;
支持实时录制数据,后续可软件内回放数据文件,提供便捷的播放控制条,并可指定时间区间进行数据导出,以便利用其它工具进行后续分析;
多窗口及资源自定义功能;
具有较强的界面自定义布局能力,及对可视化资源的便捷配置能力,尽可能满足用户需求
多平台支持;
同步支持Windows、Ubuntu及MacOs,便捷调试。
三、解决方案与应用案例:
1、集群编队
无人机编队表演、无人车队形 阵列、多机器人模拟对战等。

2、导航定位
机器人、无人车、无人机等载体导航定位。

3、轨迹捕捉
运动员轨迹监测、舞台灯光自动追踪等等。

4、测距避障
叉车、吊车、港口货车 防碰撞等。

5、互动场景
VR、AR等多人互动场景定位。

6、实验研究
用于自动驾驶模拟实验室、室内高精度动捕系统、高校导航定位算法研究课程等。

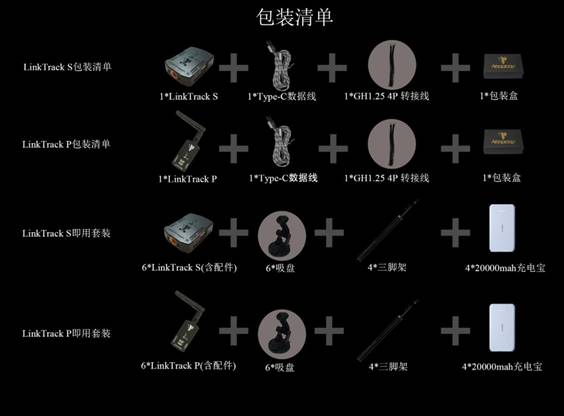
售后支持
一对一的售后技术支持,降低用户开发难度
详尽的产品手册,包括数据手册及用户手册
配套多功能数据可视化及产品配置软件NAssistant
协议解析示例代码及开源ROS驱动包
咨询该商品价格
品名:多机器人集群编队、跟随、追踪UWB定位系统LinkTrack
其他商品
-
franka Panda 7轴协作、触觉敏感
¥franka 协作机器人 -
开源ROS微型智能车无人驾驶与人工
¥车联网 无人驾驶人工智能 -
基于Husky与UR的复合操作移动机器
¥Husky UR