
产品介绍
力觉控制电动夹爪--低成本的柔性精密力控解决方案
0.1N 柔性微小力度精准控制技术!

柔性力控
RM 电缸在作业时当受到的力大于预设值时,会立即变得柔性,自适应吸收、缓和碰撞的冲击力,以保护工件。
恒力控制
在抛光、喷涂和压装等工艺上,利用力觉感知功能,可让 RM 电缸稳定保持一个力的输出,有效提高加工质量。
低成本投入
只需把 RM 电缸安装在工业机器人的末端执行部位,就能实现机器人的力度控制方案,大量节省投入成本。
简单易用
您只需输入键入出力的数值,就能精准控制RM 电缸的输出力度。(例:输出3.1N 恒定力,只需键入“3.1”即可!)
支持多种电缸型号
Softforce ™ 力觉控制功能支持多种RM 电缸型号选配,提高力控制功能精度。
FORCE CONTROL
Softforce ™ 力觉控制
0.1N 柔性微小力度精准控制技术
为您提供低成CONTROLLER
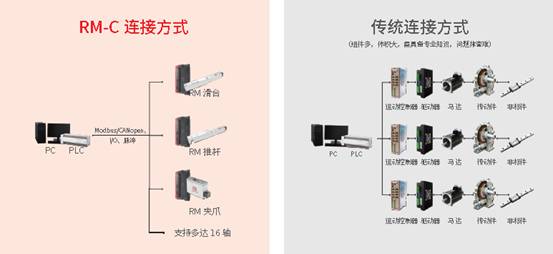
RM-C 控制器
自主研发创新技术!
功能,使用简单!支持多种编程语言控制!
支持二次开发;
提供完整的SDK/API 支持多种编程语言C# C++ JavaScript


力位混合控制(力度、位置、速度)
可选配0.1N 力觉控制方案
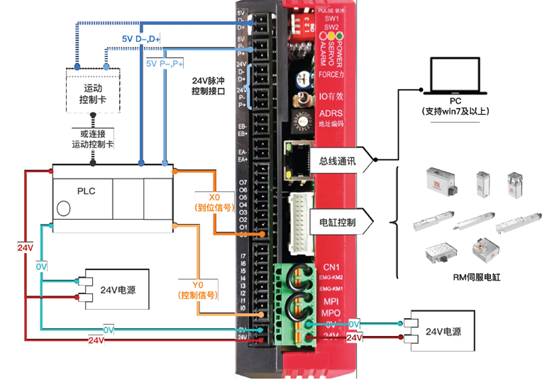
脉冲、I/O、Modbus/CANopen 三合一控制
预置10+ 种应用功能
自整定功能
外部扰动补偿功能
五分钟上手
可选一体式内置控制器,功能、性能保持不变
I/O 点数256(16 点输入、16 点输出),只需给通断信号即可运动,像气缸一样简单。
支持I/O 自定义功能,可实现先接线后配置的方案。
兼容市面脉冲控制器。
连接简单,开箱即用
预置多种应用功能
二次开发SDK
C# C++
RM 电缸提供完整的编程、示教、参数修改等API 接口,
支持且不限于Labview、C#、C++、Python 等编程语言控制。
力位混合控制
可选多种控制模式,多样化灵活组合。
伺服夹爪:力度、位置、速度、加减速度均可控制;
线性伺服电缸:力度、位置、速度、加减速度均可控制;
伺服旋转缸:角度、方向、速度、加减速度均可控制。
自适应夹取、推压功能
无需考虑位置,到达力度则停止运动;
支持柔性夹取、推压控制,适合加工
小型、柔软、易碎的工件;
可反向力度控制。

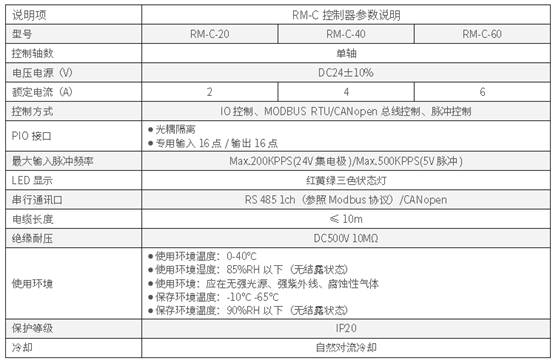
控制器技术参数
RM 软件平台界面

11 串口连接 2 填表式编程
显示目标模组的当前坐标位置
精确到0.01mm;
手动操作模式
模组后退/ 前进/ 运动到指定位置/ 停止;
一键发送/ 读取编程数据
减少控制的麻烦;
保存/ 读取点位文件
减少下一次的调试难度;
伺服/ 原点操作
回归原点、重置错误、打开/ 关闭伺服。
3 状态监控
无需安装应用5 分钟上手存储编程文件振动抑制功能自整定功能二次开发编程
4选择好串口号后,默认参数,点击[+]
一键连接目标模组。
实时反馈目标模组的运动状态:
多种命令类型,自由排序有效提升控制灵活性;
只需设置点位的位置、速度、加/ 减速度、定位
有效范围就能完成编程。
状态实时监控
显示目标模组的当前坐标位置
精确到0.01mm;
手动操作模式
模组后退/ 前进/ 运动到指定位置/ 停止;
一键发送/ 读取编程数据
减少控制的麻烦;
保存/ 读取点位文件
减少下一次的调试难度;
伺服/ 原点操作
回归原点、重置错误、打开/ 关闭伺服。
快速编程-实例:
利用5 分钟上手的RM 软件平台,您只需设置“指令”和“参数”就能快速制作您需要的程序。您做好的程序已内置在
控制器里,断开电脑独立运行。
例1 - 抛光程序(精密力控)
快速接近 → 探测(检测信号)→ 柔性推压(Softforce ™ 力觉控制功能)→ 完成 → 返回。
例2 - 工件强度检测程序(精密力控)
快速接近 → 自适应夹取功能 → 柔性夹持(Softforce ™ 力觉控制功能)→ 输出结果(信号)→ 返回。
例3 - 柔性夹取搬运程序
快速接近 → 自适应夹取功能 → 夹取确认 → 夹持(夹持确认功能)→ 松开。
例4 - 伺服压装程序
快速接近 → 探测(检测信号)→ 压装(推压确认功能)→ 保压 → 返回。
例5 - 测量工件是否在及格范围内程序
快速接近 → 探测(检测信号)→ 测量功能 → 判断(是否在及格范围) → 输出结果(信号)→ 返回。
咨询该商品价格
品名:力觉控制电动夹爪--低成本的柔性精密力控解决方案
其他商品
-
franka Panda 7轴协作、触觉敏感
¥franka 协作机器人 -
开源ROS微型智能车无人驾驶与人工
¥车联网 无人驾驶人工智能 -
基于Husky与UR的复合操作移动机器
¥Husky UR